
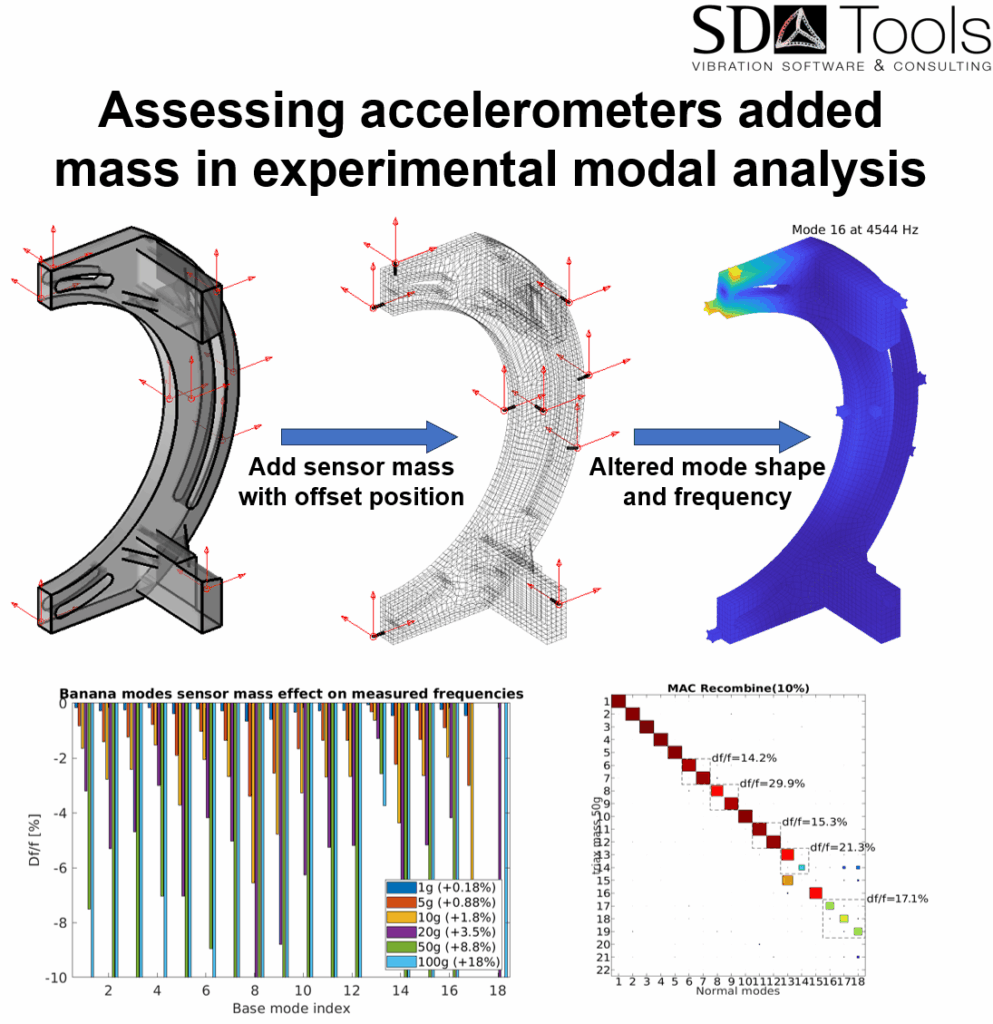
Assessing accelerometer mass effect in Experimental Modal Analysis
✅Testing is a common way of assessing the behavior of a structure, that can be used for direct characterization, structural […]
✅Testing is a common way of assessing the behavior of a structure, that can be used for direct characterization, structural […]
🎯 In structural dynamics as in any other field, prototyping is a key project validation step. To reduce as much
🚀 One of SDTools’ specialties is to provide ad hoc solutions in the vibration domain. When an R&D project is
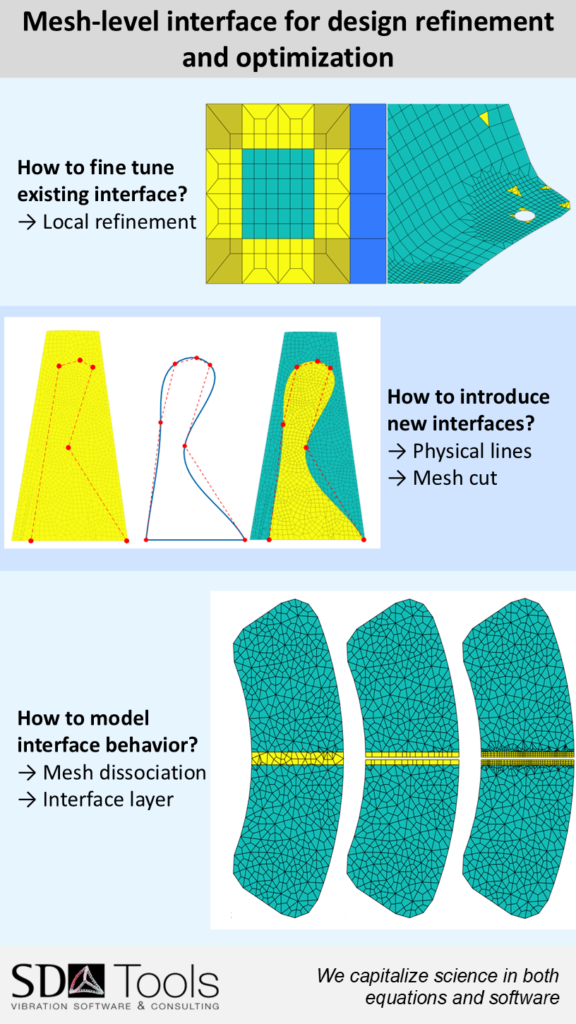
How to efficiently test modifications or refine a mesh without going back to the CAD and mesher step? Industrial context:
Progress in parametric testing/modeling for rotating machinery? 👉 Parametric modal testing and continuous tracking of Harmonic Balance Vector signals in
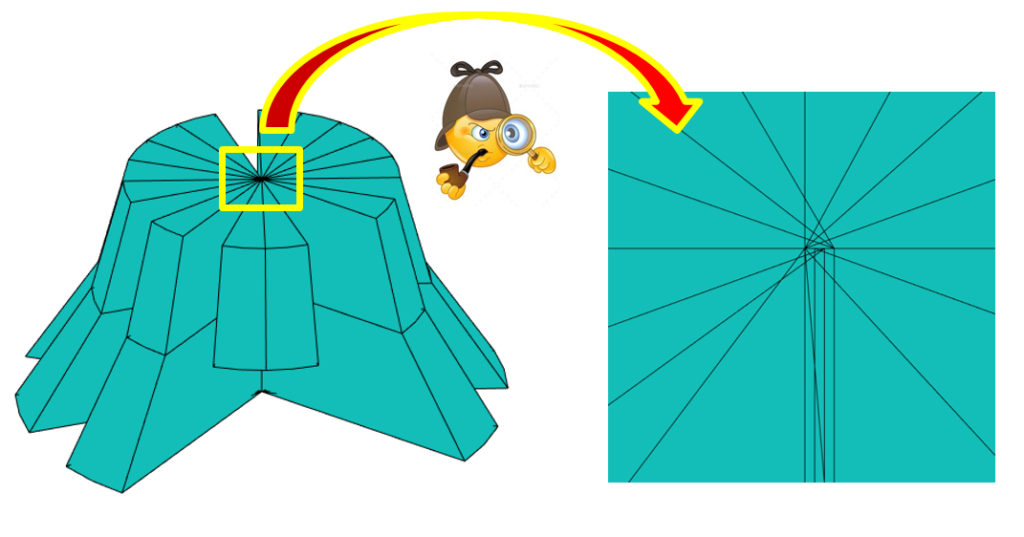
This week, I came across a not so uncommon problem with one of our projects, where negative matrix terms had

How to capture and track brake squeal features? The paper conference, accompanying the presentation of #IOMAC2025, gives more technical details
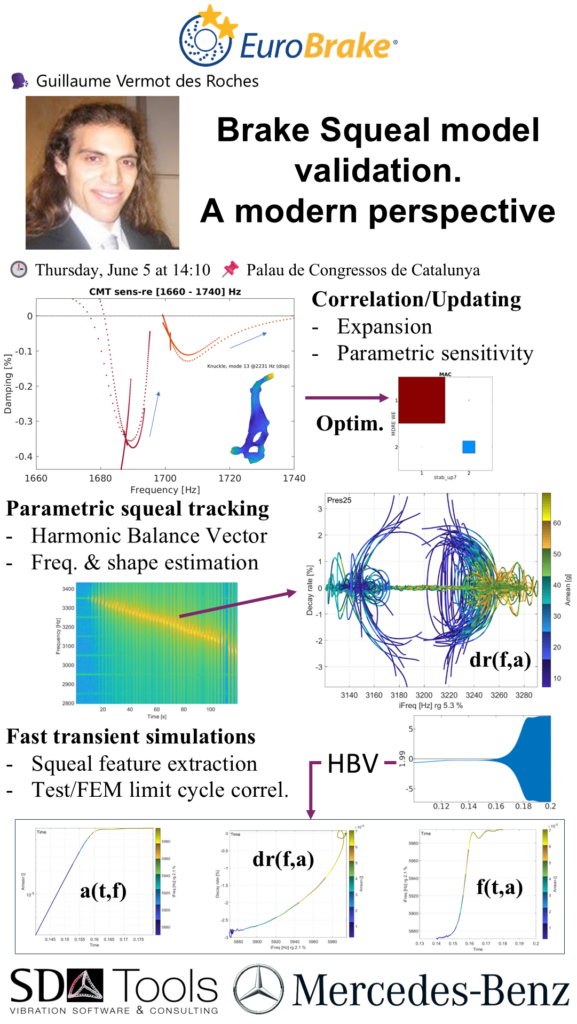
How to progress with model validation? 👉 Modern correlation/updating tools : parametrized expansion 👉 Modern Squeal experimental characterization : Harmonic
How to capture and track brake squeal features? 👉 Harmonic Balance Vector (HBV) signal model👉 HBV identification strategy👉 Squeal features
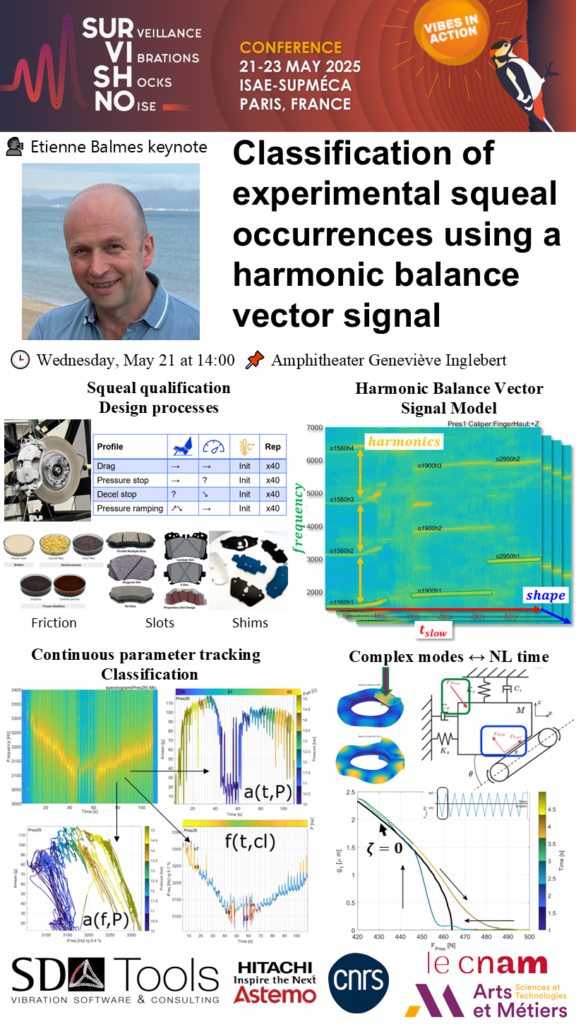
How to efficiently qualify/classify/analyze squeal events from full-brake industrial test campaigns? 👉 Squeal qualification/design processes👉 Classification of squeal occurrences using