
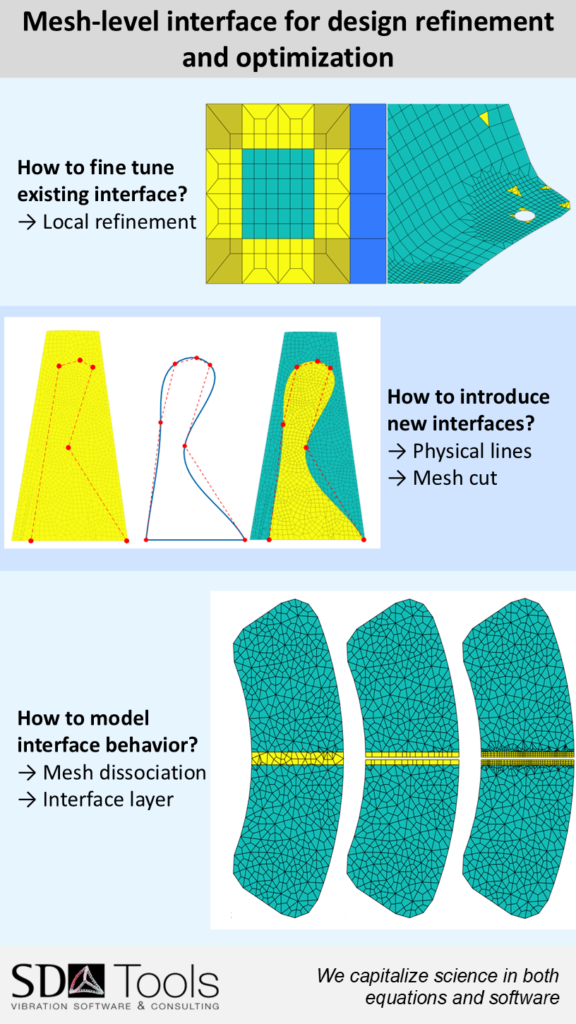
Mesh-level interface for design refinement and optimization
How to efficiently test modifications or refine a mesh without going back to the CAD and mesher step? Industrial context: […]
How to efficiently test modifications or refine a mesh without going back to the CAD and mesher step? Industrial context: […]
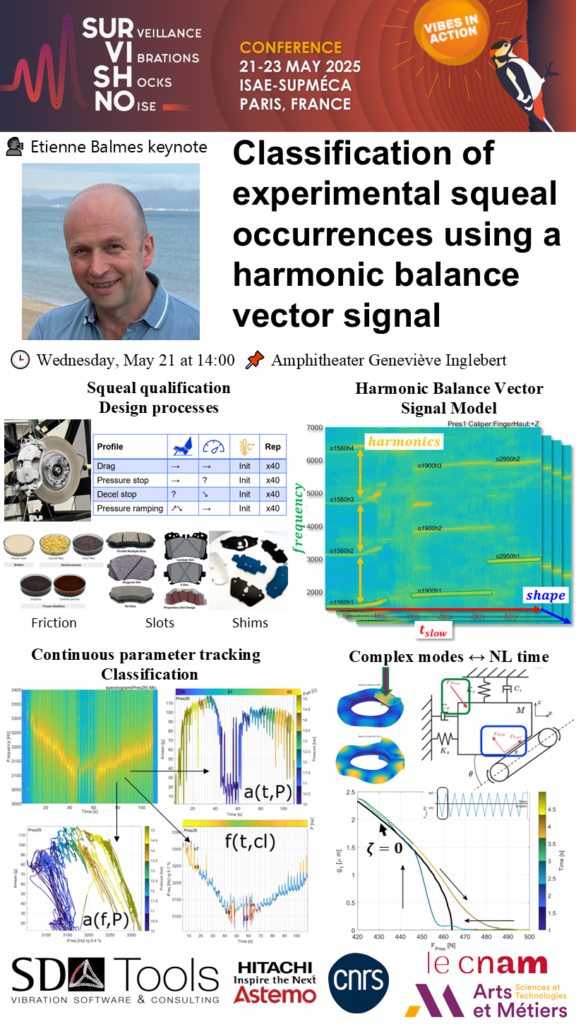
How to efficiently qualify/classify/analyze squeal events from full-brake industrial test campaigns? 👉 Squeal qualification/design processes👉 Classification of squeal occurrences using

We are happy to welcome Gaëtan Guillet to our research team! He’s joining Groupe SNCF for the next three years
Modelling is an act of reality conceptualization. It is thus directly related to a simplification process where one applies a
In the series of our posts concerning model quality and connections, constraints regularization or penalization is a common topic. For
How to properly manage connections to shells in 3D models ? Many mechanical systems use thin structures such as stamped
Flange support around fasteners is a commonly overlooked topic in industrial structural dynamics applications. It is due to implementation complexity