
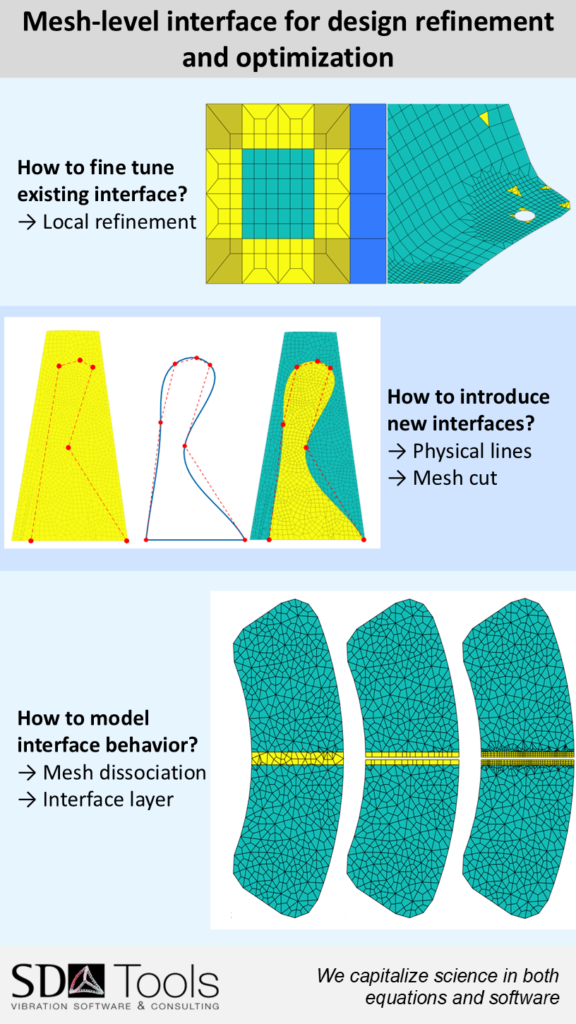
Mesh-level interface for design refinement and optimization
How to efficiently test modifications or refine a mesh without going back to the CAD and mesher step? Industrial context: […]
How to efficiently test modifications or refine a mesh without going back to the CAD and mesher step? Industrial context: […]
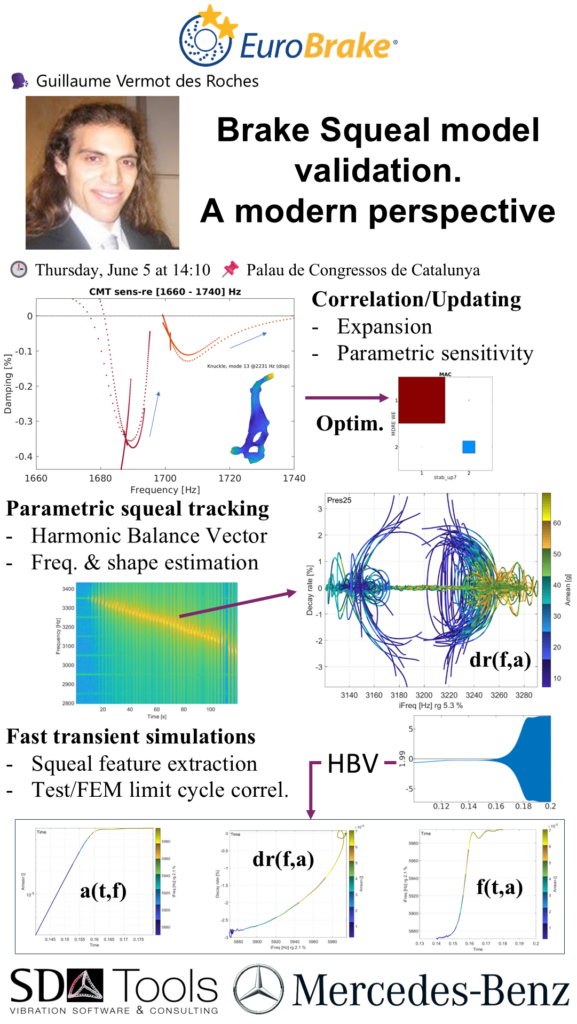
How to progress with model validation? 👉 Modern correlation/updating tools : parametrized expansion 👉 Modern Squeal experimental characterization : Harmonic
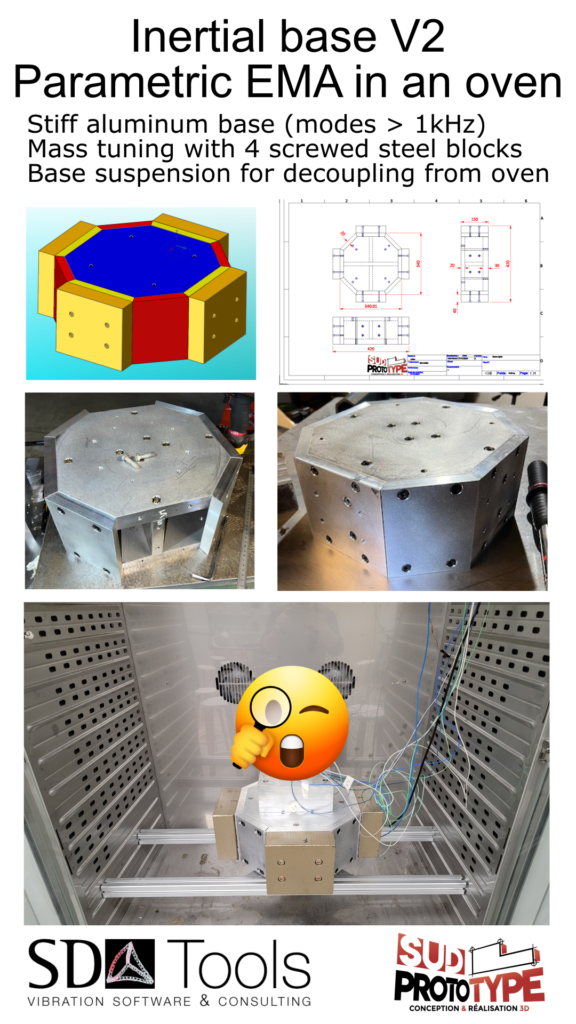
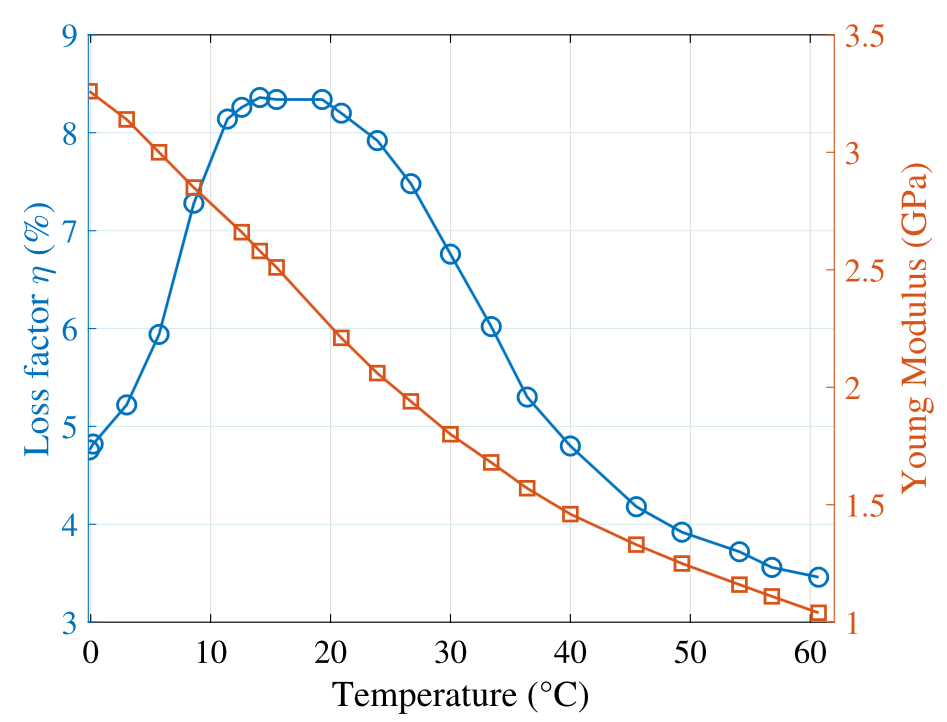
Project context: SDTools regularly performs experimental modal analysis (EMA) in an oven to monitor temperature dependence. One of the aims of
Modelling is an act of reality conceptualization. It is thus directly related to a simplification process where one applies a
In the series of our posts concerning model quality and connections, constraints regularization or penalization is a common topic. For
In partnership with the “SOURCE” ANR project, SDT has been used by the DISCoH researcher’s team from PIMM laboratory (Nassim
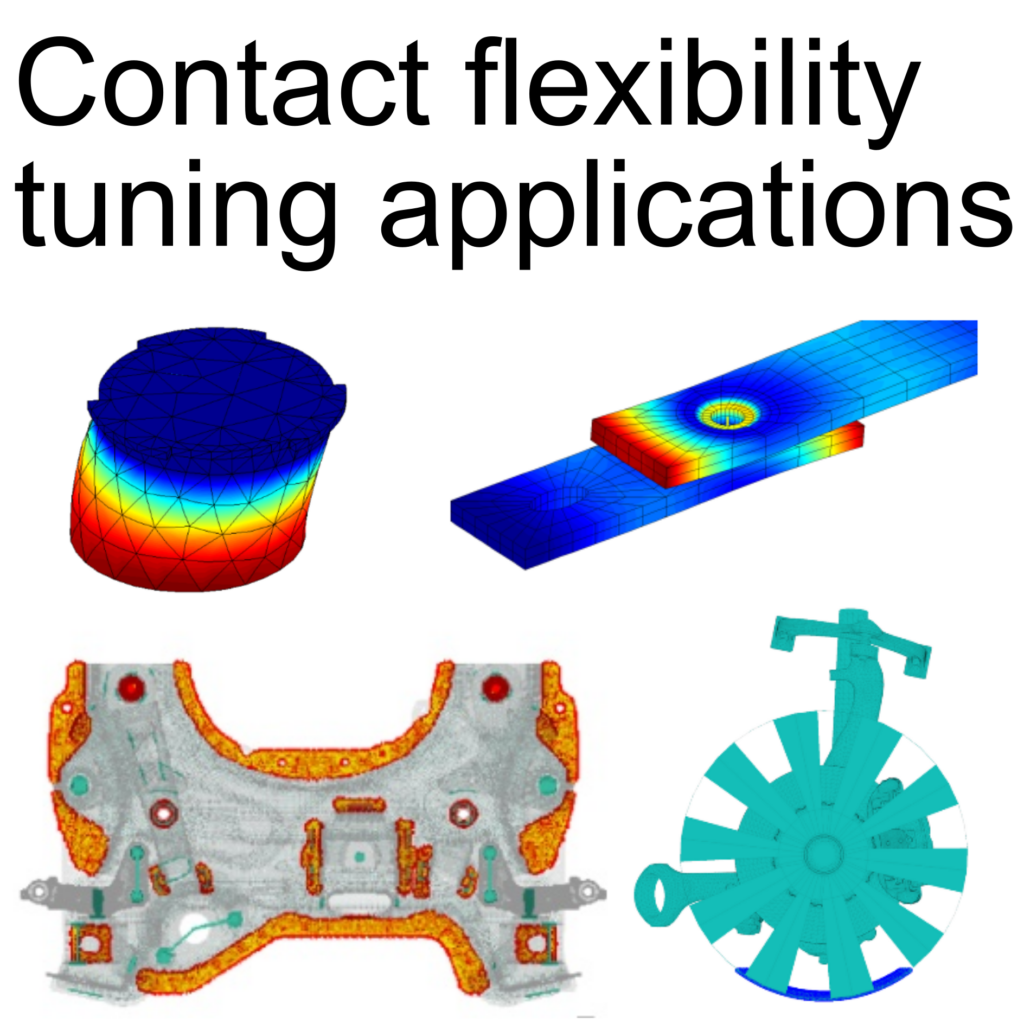
Flange support around fasteners is a commonly overlooked topic in industrial structural dynamics applications. It is due to implementation complexity
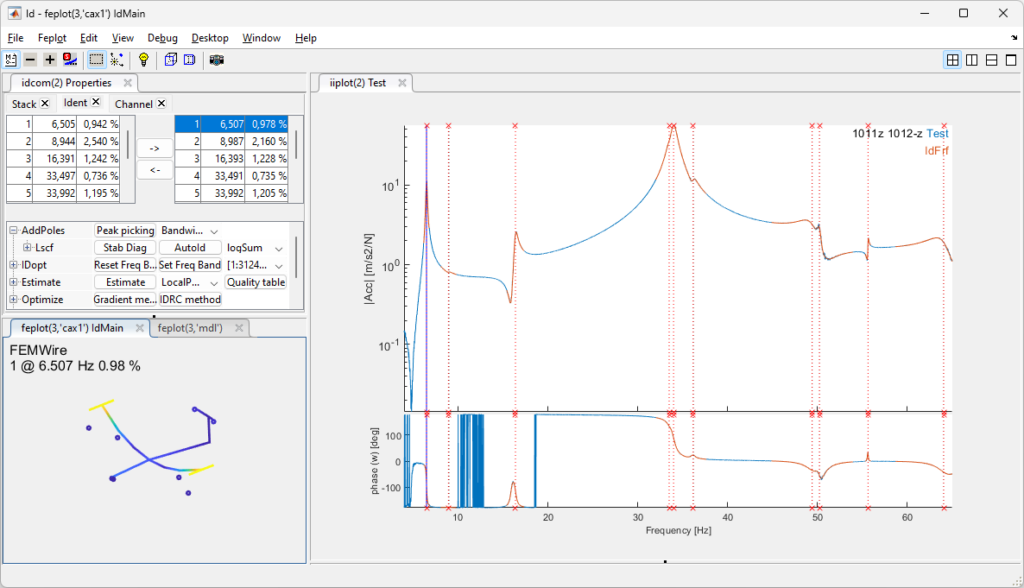
Error characterization in modal analysis and model updating. An overview of tools and procedures using the Structural Dynamics Toolbox. will