PDF Index
PDF Index|
Contents
Functions
PDF Index |
Purpose
element function for scalar springs and penalized rigid links
Description
In an model description matrix a group of celas elements starts with a header row [Inf abs('celas') 0 ...] followed by element property rows following the format
[n1 n2 DofID1 DofID2 ProID EltID Kv Mv Cv Bv]
with
| n1,n2 | node numbers of the nodes connected. Grounded springs are obtained by setting n1 or n2 to 0. |
| DofID | Identification of selected DOFs. |
| For rigid links, the first node defines the rigid body motion of the other extremity slave node. Motion between the slave node and the second node is then penalized. DofID (positive) defines which DOFs of the slave node are connected by the constraint. Thus [1 2 123 0 0 0 1e14] will only impose the penalization of node translations 2 by motion of node 1, while [1 2 123456 0 0 0 1e14] will also penalize the difference in rotations.
| |
| For scalar springs, DofID1 (negative) defines which DOFs of node 1 are connected to which of node 2. DofID2 can be used to specify different DOFs on the 2 nodes. For example [1 2 -123 231 0 0 1e14] connects DOFs 1.01 to 2.02, etc. Use of negative DofID1 will only activate additional DOF if explicitly given.
| |
| ProID | Optional property identification number (see format below) |
| Kv | Optional stiffness value used as a weighting associated with the constraint. If Kv is zero (or not given), the default value in the element property declaration is used. If this is still zero, Kv is set to 1e14. |
| Bv | Optional stiffness hysteretic damping value : stiffness given by Kv+iBv (rather than Kv(1+iη) when using p_spring). |
p_spring properties for celas elements take the form [ProID type KvDefault m c eta S]
By default a celas element will activate all 6 mechanical DOF in the model. If the celas element is not linked to other elements using these DOF (e.g. 3D elements do not use DOF 4-6), there will be a risk of null stiffness occurrence at assembly. To alleviate this problem use negative DofID1 that will only activate additional DOF in the specified list. One can also fix the spurious DOF as a boundary condition.
Below is the example of a 2D beam on elastic supports.
model=femesh('Testbeam1 divide 10'); model=fe_case(model,'FixDof','2D',[.01;.02;.04]); model.Elt(end+1,1:6)=[Inf abs('celas')]; % spring supports model.Elt(end+[1:2],1:7)=[1 0 -13 0 0 0 1e5;2 0 -13 0 0 0 1e5]; def=fe_eig(model,[5 10 0]); feplot(model,def);
When using local displacement bases (non zero DID), the stiffness is defined in the local basis and transformed to global coordinates.
The element property row is defined by
[n1 n2 MatId ProId EltId x1 x2 x3 EDID S OCID S1 S2 S3] [n1 n2 MatId ProId EltId NodeIdRef 0 0 EDID S OCID S1 S2 S3]
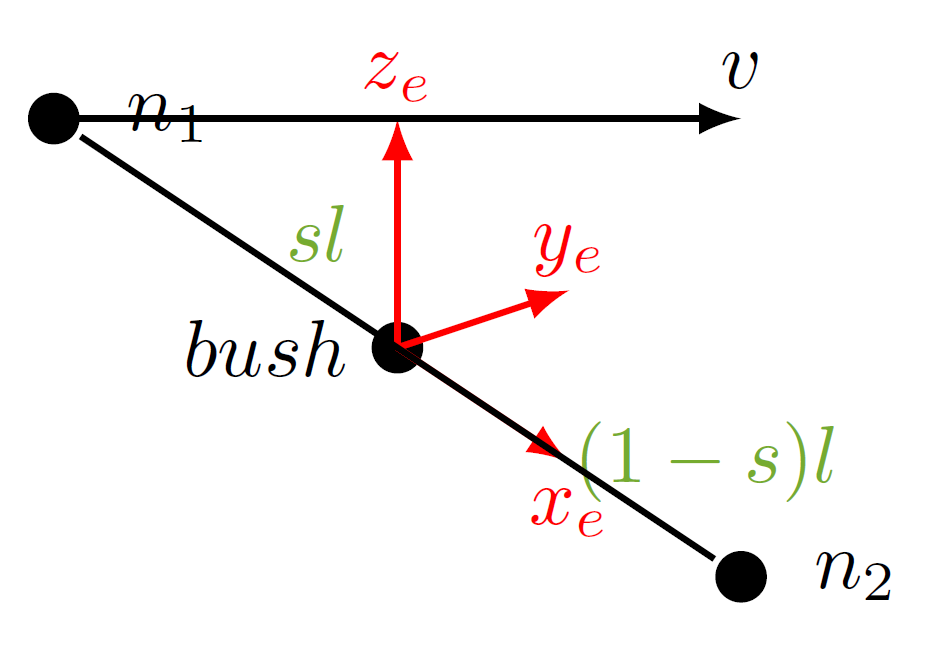
The orientation of the spring (basis xe,ye,ze) can be specified by
The spring/damper is located at a position interpolated between n1 and n2 using S, such that xi = S n1 + (1−S) n2. The midpoint is used by default, that-is-to-say S is taken at 0.5 if left to zero. To use other locations, specify a non-zero OCID and an offset S1,S2,S3.
It is possible to set n2 to 0 to define a grounded cbush.
See also